
The goal of this assignment is to get our hands dirty in different aspects of image warping with a “cool” application -- image mosaicing. We will take two or more photographs and create an image mosaic by registering, projective warping, resampling, and compositing them. Along the way, we will learn how to compute homographies, and how to use them to warp images.
I took a couple of picture sets (2 or 3 imagees) for a few indoor and outdoor scenes that follow the below "rules":
For each correspondence (x1, y1) ↔ (x2, y2), two rows are added to the matrix A, forming the system:
[
-x1, -y1, -1, 0, 0, 0, x1x2, y1x2, x2
0, 0, 0, -x1, -y1, -1, x1y2, y1y2, y2
]
We use Singular Value Decomposition (SVD) to solve the homogeneous system Ah = 0. The solution vector h (which gives us the homography matrix H) is found from the last row of VT.
After computing the homography matrix H, it is normalized by dividing by the bottom-right value H[2,2] to ensure that the scaling factor is 1.
The corners of the input image are transformed using the homography matrix H to predict the bounding box of the warped image.
We create a grid of output coordinates that span the predicted bounding box. These are the coordinates where we want to compute pixel values for the warped image.
We apply the inverse homography H-1 to map each pixel in the output image back to a coordinate in the input image.
We use scipy.interpolate.griddata to interpolate pixel values at the computed coordinates. This avoids aliasing by smoothly sampling the input image.
Pixels that are outside the valid bounds of the input image are marked using an alpha mask or set to zero.
For the process of image rectification, I took a couple of images of rectangular objects, such as a laptop and TV. After which I took the following steps:
im1_pts, representing their coordinates in the image.im2_pts, you define the desired position of these points, typically corresponding to the four corners of a perfect rectangle (e.g., [0, 0], [1, 0], [1, 1], [0, 1]).computeH function that you already developed, compute the homography matrix that maps the points in im1_pts to im2_pts.warpImage function to apply the computed homography and warp the input image so that the rectangular object is rectified.


The approach to create a seamless mosaic between two images involves the following steps:
This method results in a combined mosaic that naturally transitions from one image to the other, with aligned perspectives and blended overlapping areas.
Below are the results









The goal of this project is to create a system for automatically stitching images into a mosaic. A secondary goal is to learn how to read and implement a research paper.
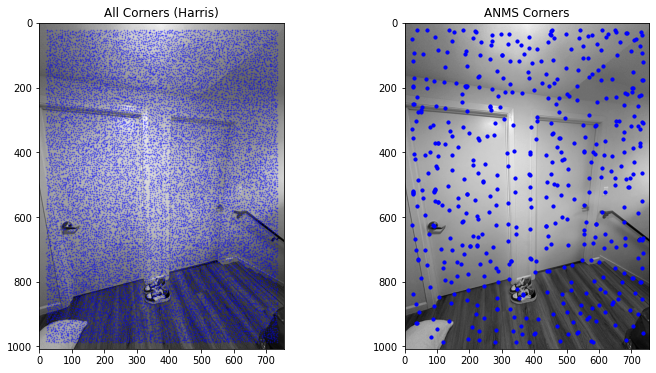
To start, I implemented the Harris corner detector to identify interest points in a single-scale image, following Section 2 of the paper. Rather than developing a multi-scale approach or focusing on sub-pixel accuracy, I simplified the process by using a standard implementation of the Harris detector, provided in harris.py. This function calculates the Harris corner response across the image, highlighting areas with strong corner-like structures.
Once the Harris corners were detected, I overlaid the corner points on the original image to visually represent where interest points were identified. This visualization helped verify that the corner detection was capturing key structural details in the image, which would later be essential for robust feature matching.
After detecting Harris corners, I implemented Adaptive Non-Maximal Suppression (ANMS) as described in Section 3 of the paper. ANMS refines the set of detected corners by prioritizing points that are not only strong in response but also well-distributed across the image. This step addresses a common issue in feature detection, where too many interest points cluster in certain regions, potentially leading to less effective matching.
ANMS works by selecting a subset of corners based on a suppression radius that adapts according to corner strength. For each corner, I computed the distance to other stronger corners within the neighborhood and retained only those that had a high suppression radius. This ensured a uniform spatial distribution of points, improving the robustness of feature matching in areas of overlap between images. I visualized the final set of selected corners overlaid on the original image to confirm a balanced distribution.
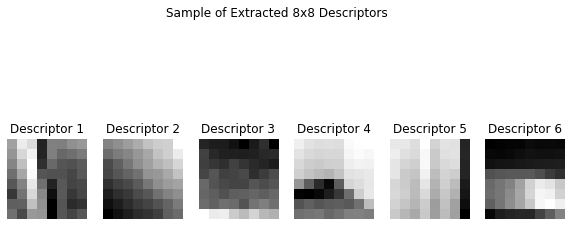
With a refined set of interest points, I proceeded to extract feature descriptors from each selected corner, following Section 4 of the paper. Instead of implementing rotation-invariant descriptors, I simplified the approach by extracting axis-aligned, fixed-size patches, specifically 8x8 patches centered on each corner point. To capture enough context for each descriptor, I extracted each patch from a larger 40x40 window around each interest point.
After sampling, each patch was bias/gain-normalized by subtracting the mean and dividing by the standard deviation. This normalization ensured that the descriptors were invariant to lighting variations, making the features more reliable across images. Each normalized patch was then flattened into a feature vector, which would later be used in the matching step.
The final step involved matching these feature descriptors between pairs of images. Following Section 5 of the paper and Lowe’s approach, I computed the sum of squared differences (SSD) between each pair of feature descriptors from the two images. For each feature in one image, I identified the nearest and second-nearest neighbors in the other image based on SSD distance. To filter out ambiguous matches, I applied Lowe’s ratio test, which compares the SSD ratio of the closest match to the second-closest match. Only matches with a ratio below a certain threshold were retained, ensuring that each matched pair was unique and distinctive.
This matching process allowed me to identify pairs of points between images that had similar local structures. By visualizing the matches, I could confirm that they were accurate and meaningful, setting up a solid foundation for further steps, such as estimating a robust homography for image stitching.
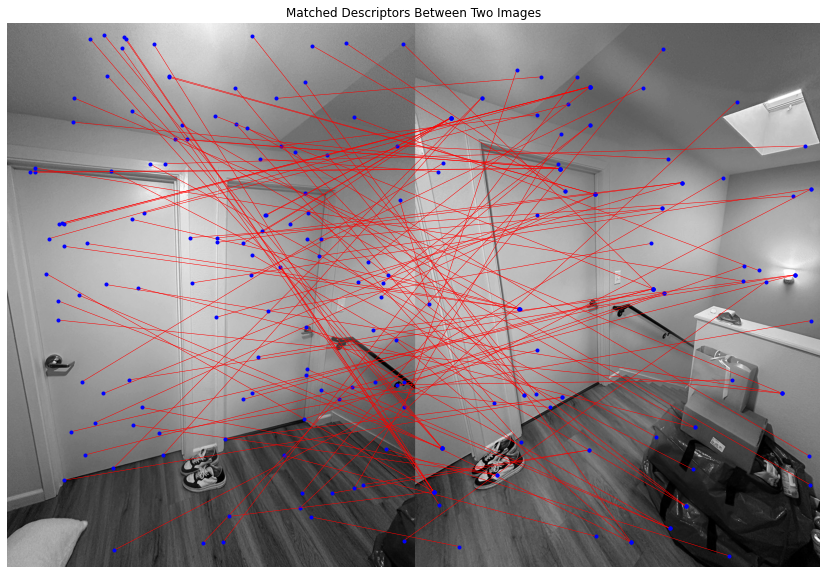
Below are the results
The coolest thing I learned through this project was the power and versatility of feature-based image matching techniques. Diving into the paper gave me a deeper appreciation for the nuances of computer vision, especially in how robust matching pipelines can be created by carefully balancing detection, descriptor extraction, and spatial distribution of features. The implementation of Adaptive Non-Maximal Suppression (ANMS) was particularly enlightening; I realized how essential it is to ensure a uniform spatial distribution of features to improve matching accuracy and avoid clusters that might introduce ambiguity.
Overall, it was a great learnings experience and a fun project.